Olá, venho com esse tutorial explicar como configurar o cartão dos robôs aspiradores! Não achei informações em português e as informações que já existiam eram desatualizadas ou não informavam o procedimento completo.
Antes disso, integre seu Roborock ao Home Assistant:
Com o Roborock já integrado, vamos ao tutorial:
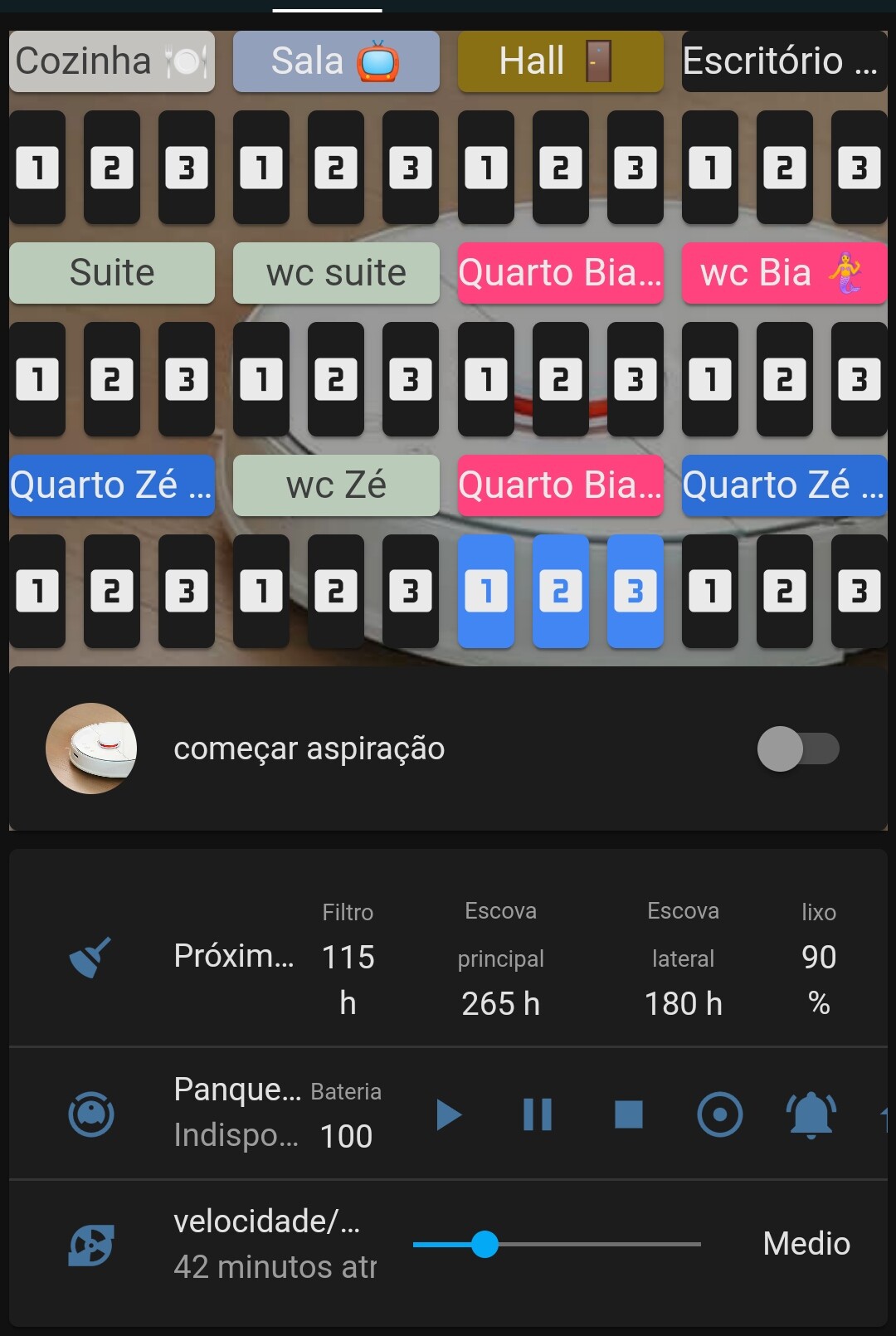
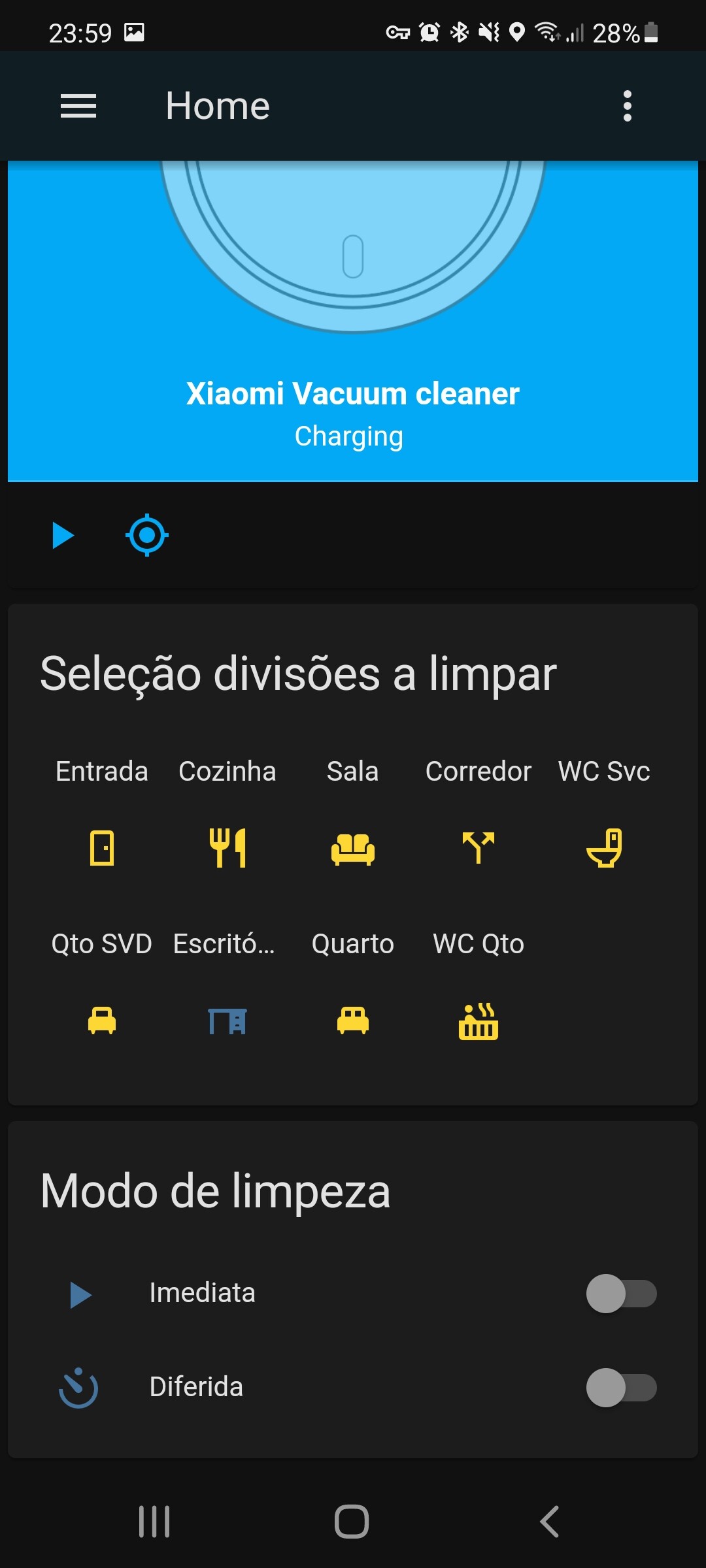
O Vacuum Card ficará assim, com informações sobre o robô, os cômodos disponíveis para limpeza com um click e o mapa para visualizar a limpeza.
Antes de tudo temos que ter o HACS instalado no Home Assistant! Para isso podem seguir esse tutorial:
Agora já com o HACS instalado vamos até a aba Frontend para instalar o Vacuum card!
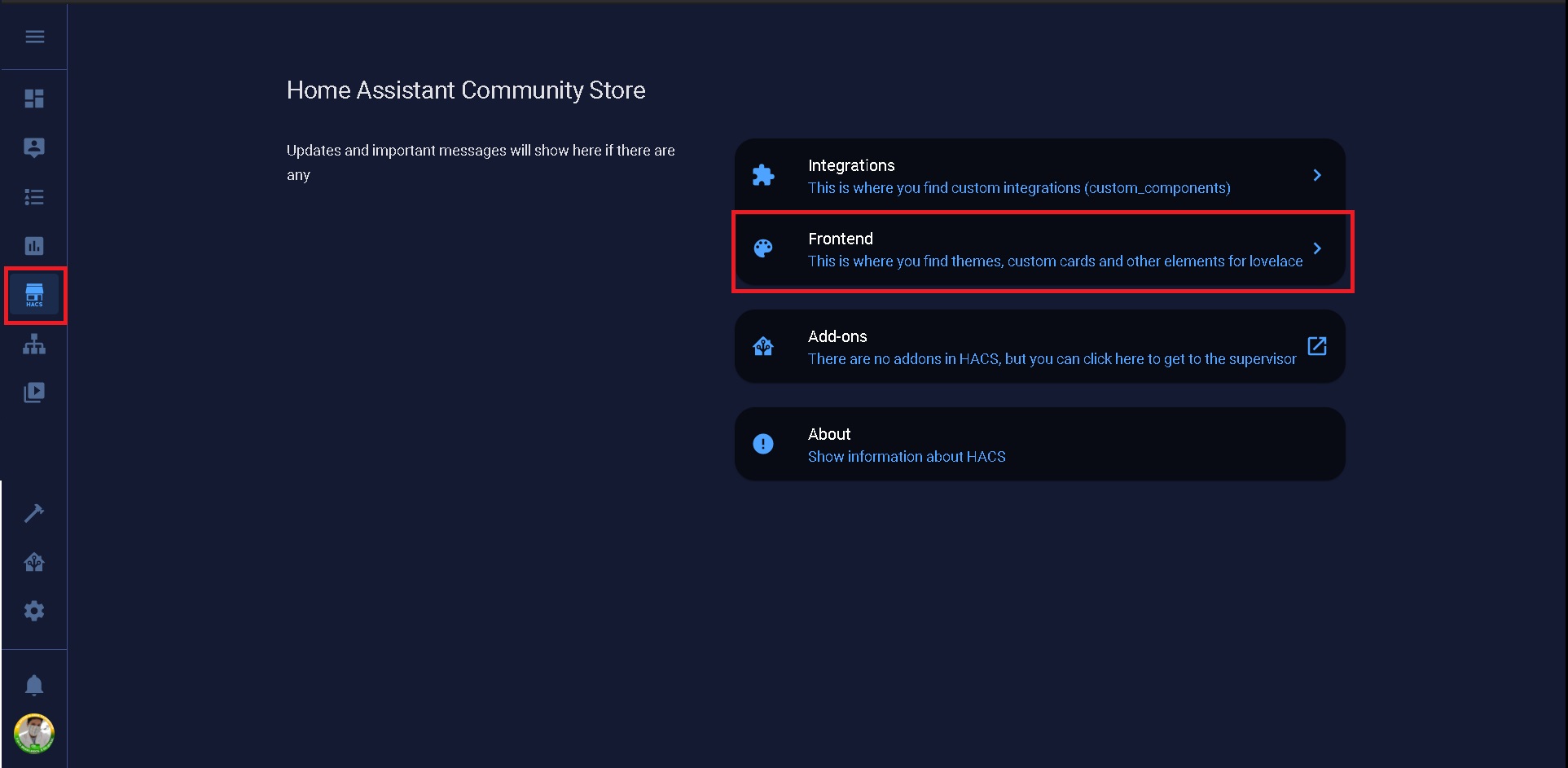
Na aba Frontend vamos no “+ EXPLORE & ADD REPOSITORIES” no canto direito abaixo!
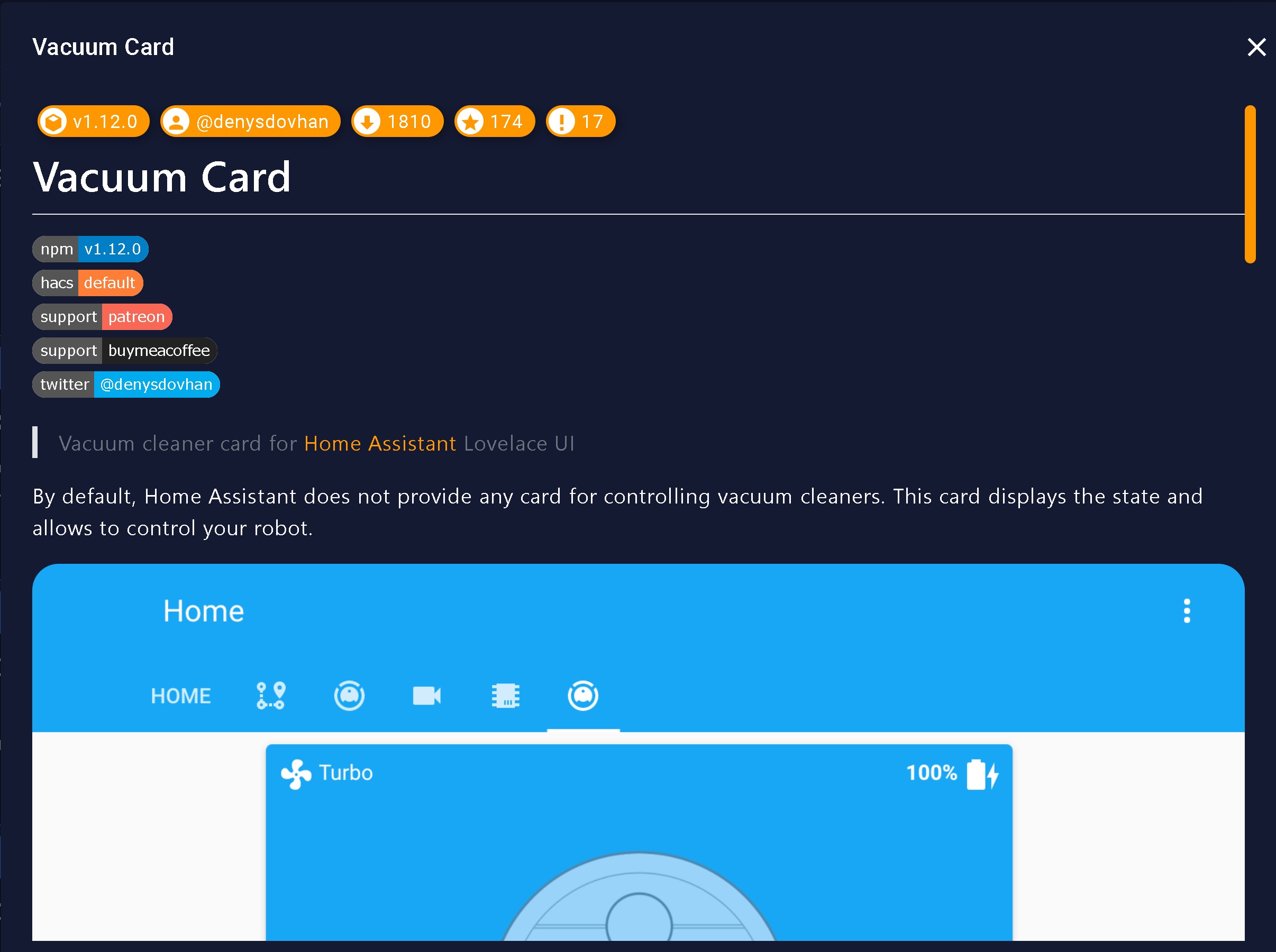
Vamos procurar o Vaccum Card para instalar, escreva Vacuum Card.

Com ele aberto agora é só clicar para instalar o repositório!

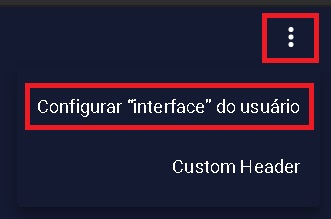
Com o Vacuum Card instalado e o Home Assistant já reiniciado, vamos adicionar o cartão na nossa tela de “Visão Geral”. Vamos no menu no canto direito a cima e clicar em Configurar “interface” do usuário.
Clicando no “+ ADICIONAR CARTÃO” no canto direito em baixo.
Vamos adicionar o cartão clicando na opção Personalizado: Vacuum Card.
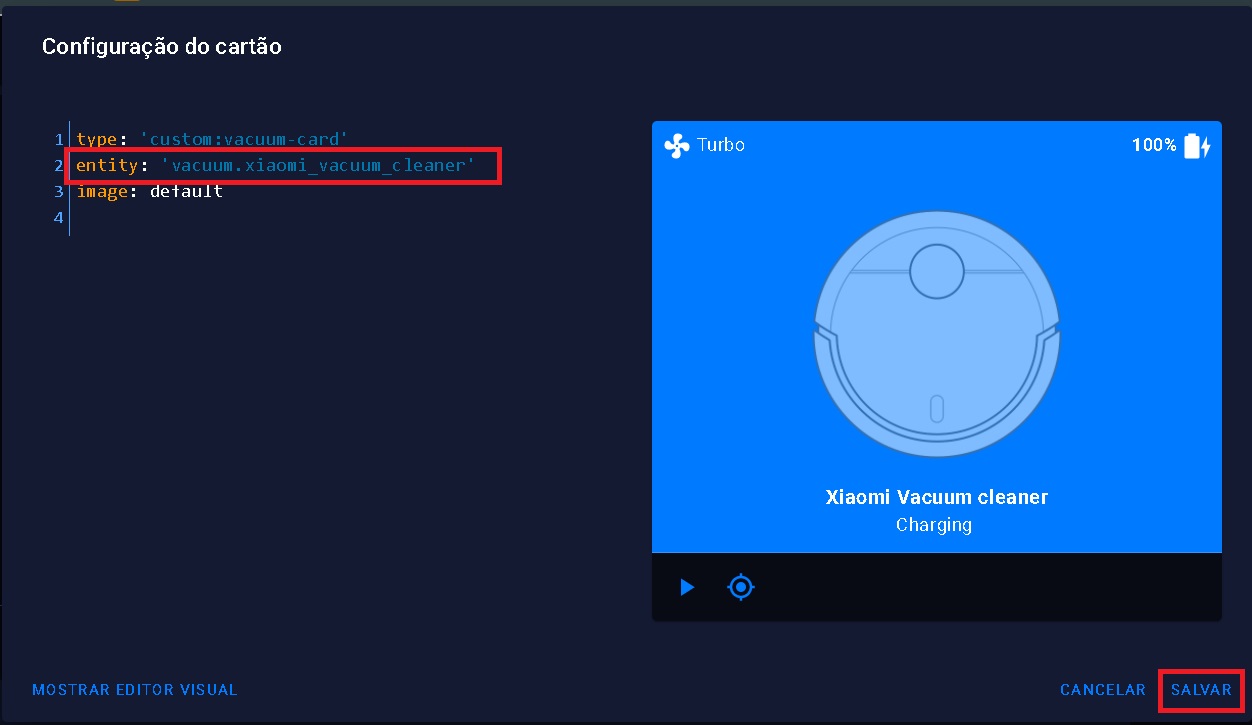
Com a tela para adicionar o cartão aberta temos que preencher com a entidade do nosso robô aspirador.

Vamos preencher certinho e clicar em salvar!
Com ele já adicionado vamos clicar em Editar!

Nas opções do cartão vamos clicar em Mostrar Editor de Código.

Com os códigos do cartão abertos vamos adicionar os códigos para temos os dados do robô aspirador e clique em Salvar.

stats:
default:
- attribute: filter_left
unit: horas
subtitle: Filtro
- attribute: side_brush_left
unit: horas
subtitle: Escova lateral
- attribute: main_brush_left
unit: horas
subtitle: Escova principal
- attribute: sensor_dirty_left
unit: horas
subtitle: Sensores
cleaning:
- attribute: cleaned_area
unit: m2
subtitle: Cleaning area
- attribute: cleaning_time
unit: minutes
subtitle: Cleaning time
Agora já temos os dados do nosso robô adicionados ao cartão!

Para darmos andamento no tutorial agora temos que criar os scripts para os comandos de cada cômodo da casa!
Como sabemos o robô aspirador separa a casa em cômodos, como podemos ver na foto abaixo, no caso temos 7 cômodos diferentes!
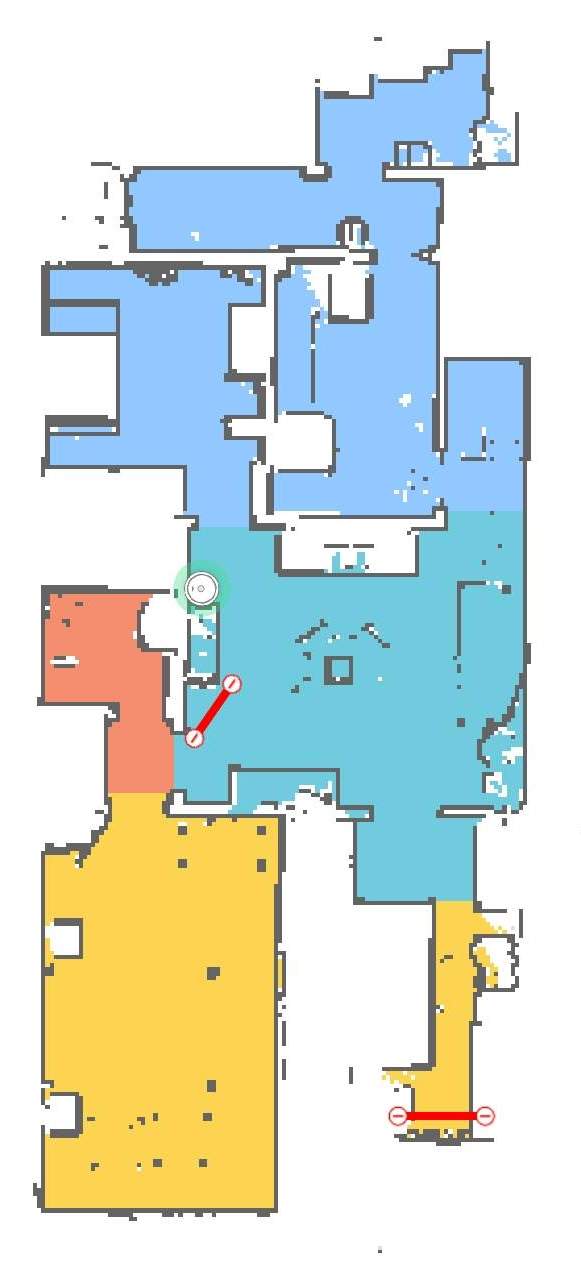
Para cada cômodo o robô separa um número, no meu caso são 7 cômodos, então são cômodos de 1 a 7. No seu caso podem ser mais ou menos cômodos, isso vária muito.
Não temos como saber qual cômodo é qual então temos que ir na tentativa e erro até descobrir, no meu caso o cômodo 2 é um quarto.
Devemos ir no config, no arquivo script.yaml e criar o seguinte script.
Criei um script com o nome de quarto, vc pode alterar para o nome do cômodo após descobrir qual é o cômodo para cada número.
Em params você vai alterar os número dos cômodos, cada número é um cômodo diferente.
Não esqueça de colocar a entidade correta do seu robô aspirador em entity_id.
quarto:
sequence:
- data:
command: app_segment_clean
params:
- 2
service: vacuum.send_command
entity_id: vacuum.xiaomi_vacuum_cleaner
Com o script criado, agora é só salvar e reiniciar o Home Assistant.
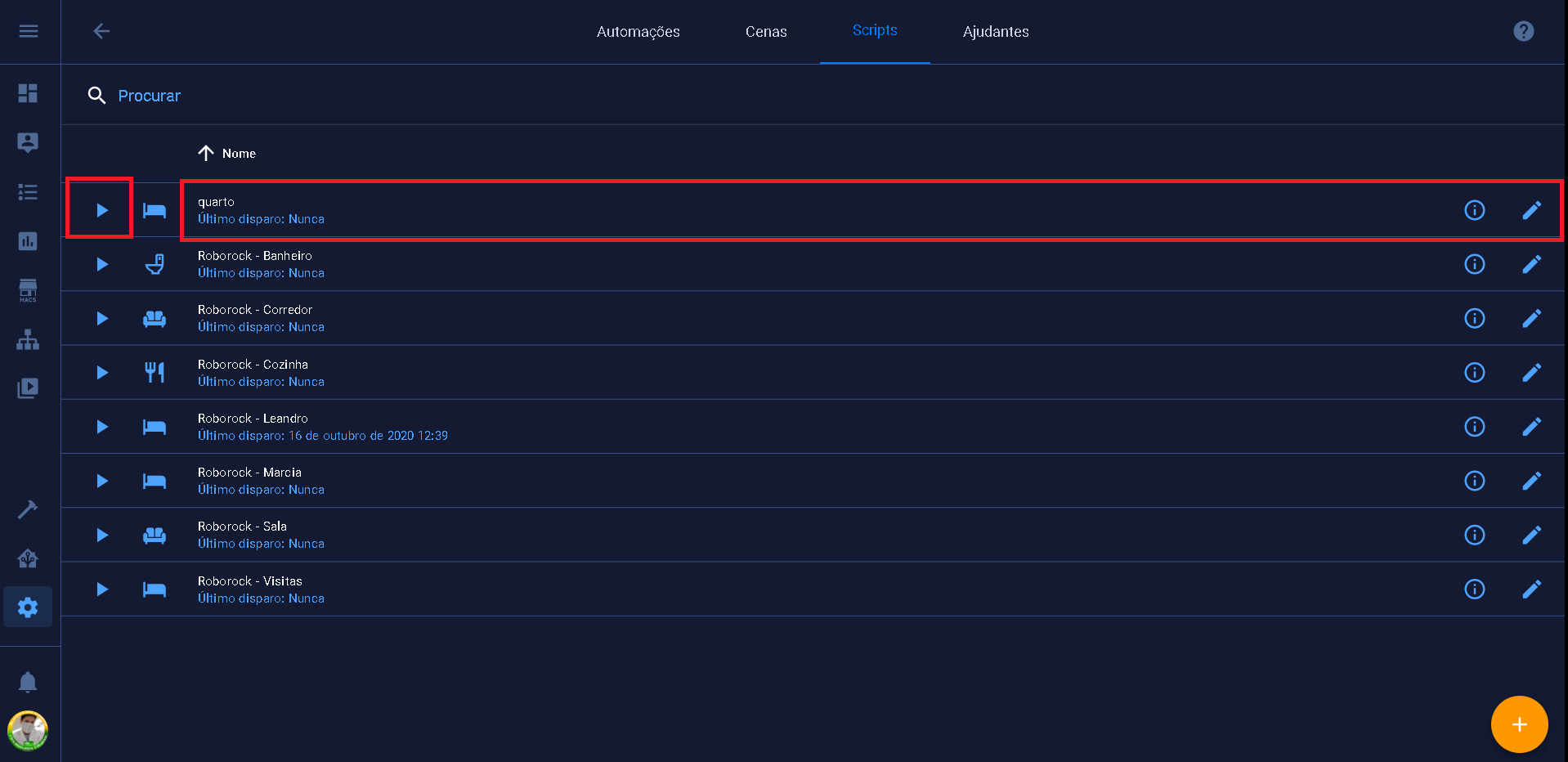
Vai perceber que foi criado o script no Home Assistant na aba de scripts! Para testar o script e saber qual cômodo é o número que colocou é só clicar no ícone de play, assim consegue ver para aonde o robô irá!
Com todos os scripts prontos, agora é só terminar de configurar o cartão!
Agora vamos adicionar mais um código para adicionar o script que criamos ao cartão do robô aspirador!
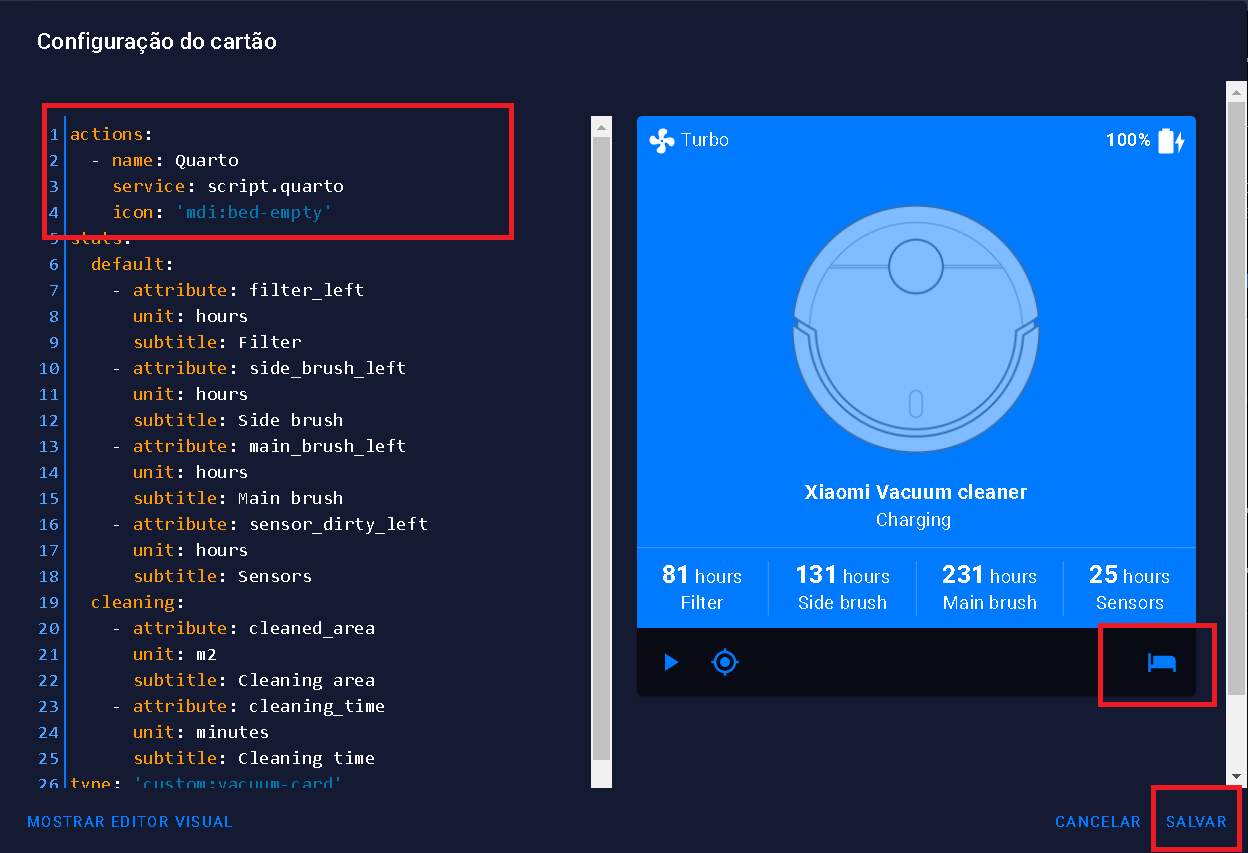
actions:
- name: Quarto
service: script.quarto
icon: 'mdi:bed-empty'
Em name vamos colocar o nome do cômodo que queremos que apareça quando colocamos o mouse em cima do ícone.
Em Service vamos colocar o nome do script que criamos! Lembra que coloquei o nome do script de quarto? Então o nome do script é script.quarto
E em icon vamos colocar o ícone referente ao cômodo, se for um quarto podemos usar mid:bed ou mdi:bed-empty, para uma sala podemos usar mdi:sofa e para o banheiro (casa de banho) mid:toilet. Site com os icones: https://cdn.materialdesignicons.com/3.2.89/
Agora é só clicar em Salvar!
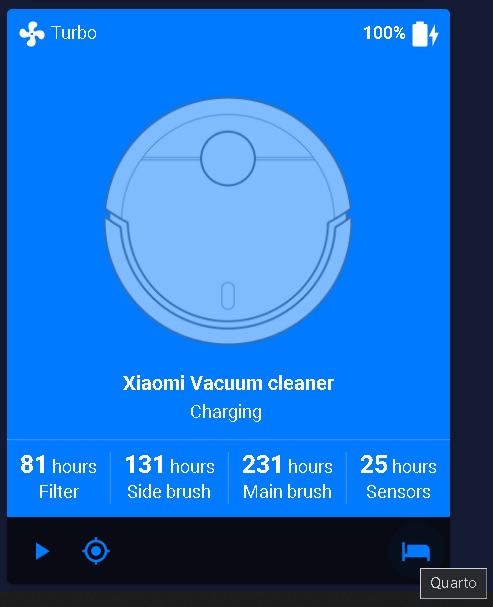
Clicando em cima do ícone o robô aspirador vai limpar o cômodo!
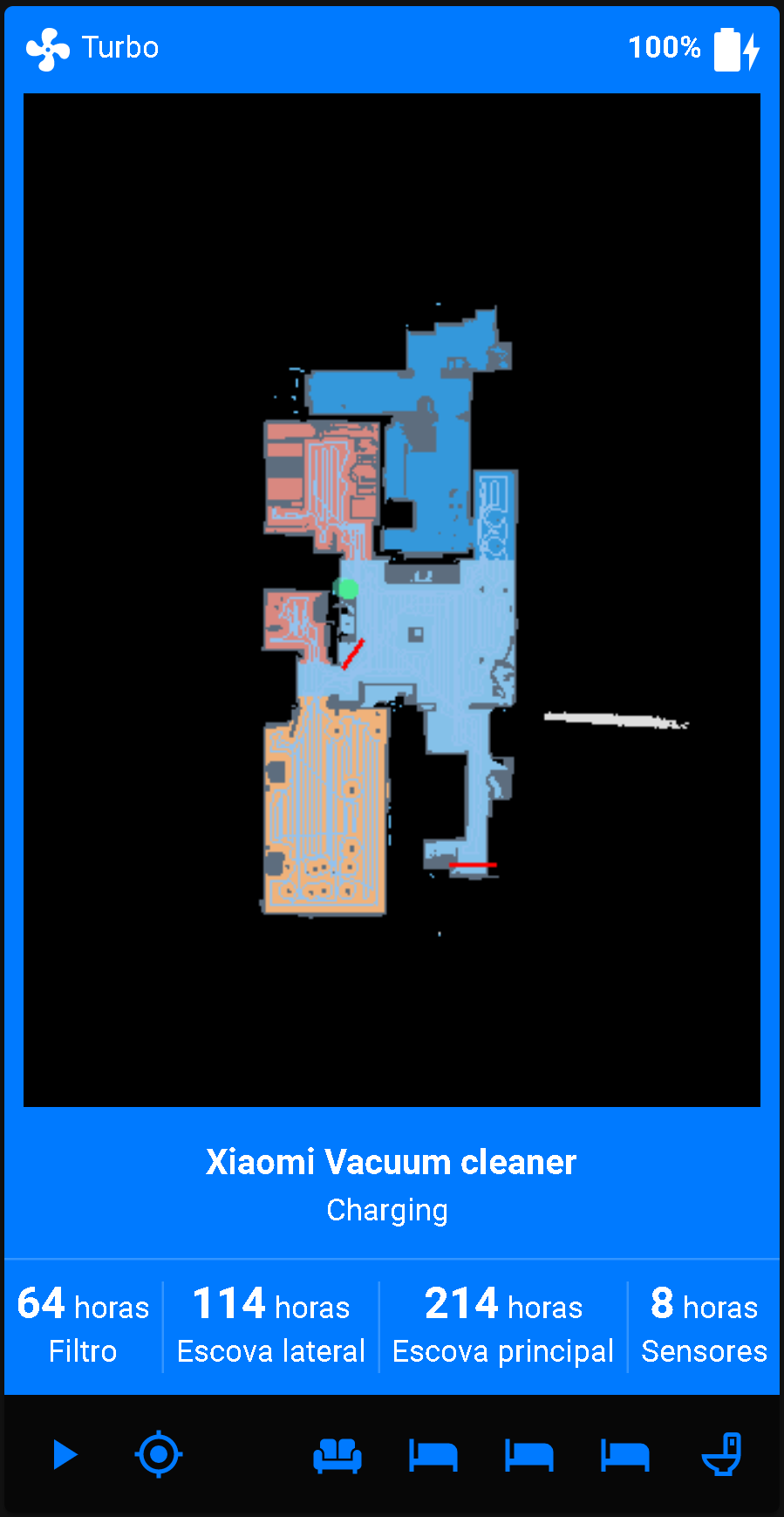
Gostaria de visualizar o mapa e observar em tempo real onde o seu robô aspirador se encontra?
Para ter o mapa é preciso instalar um componente pelo HACS!
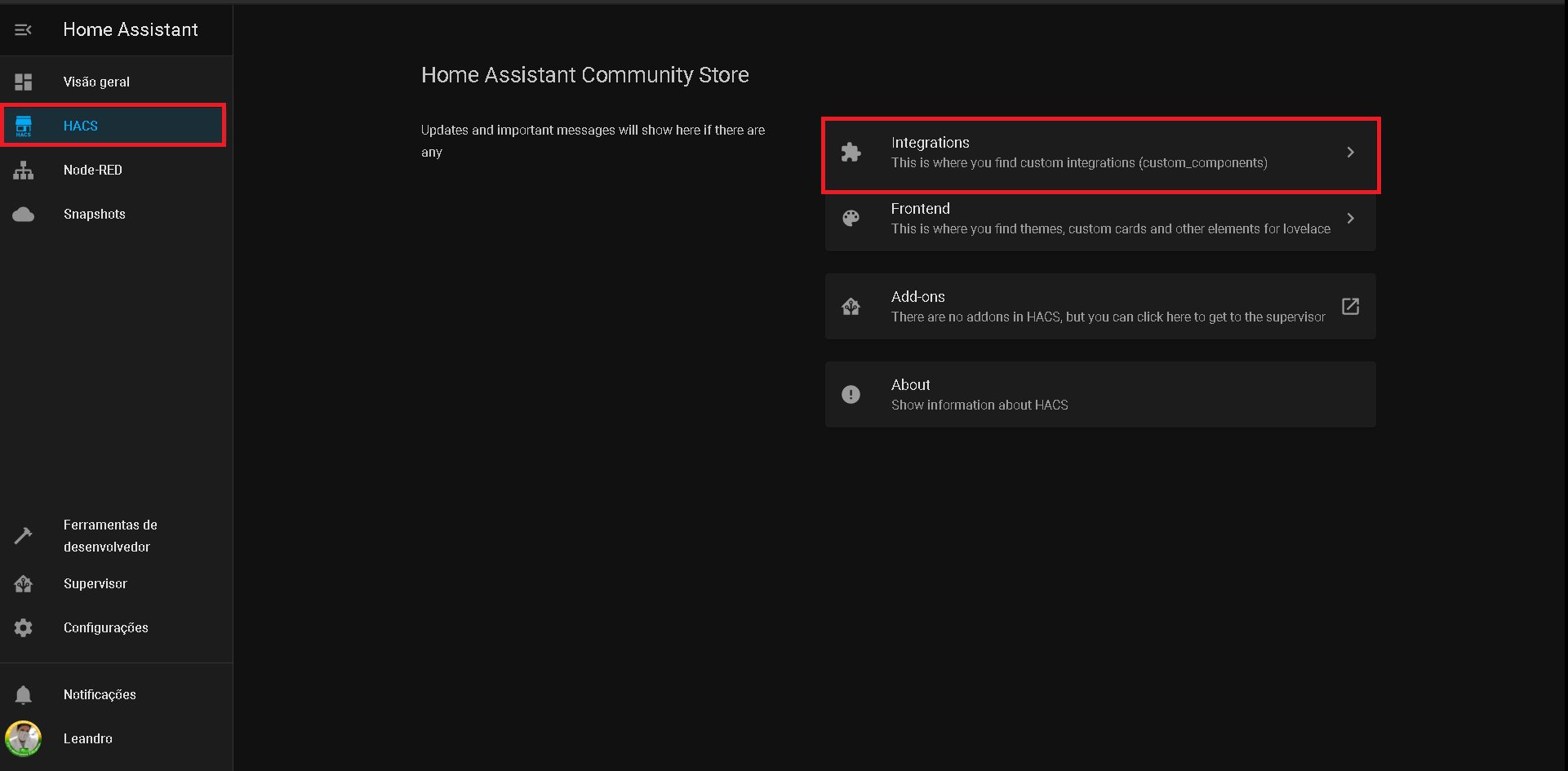
Vá no HACS, em integrações.
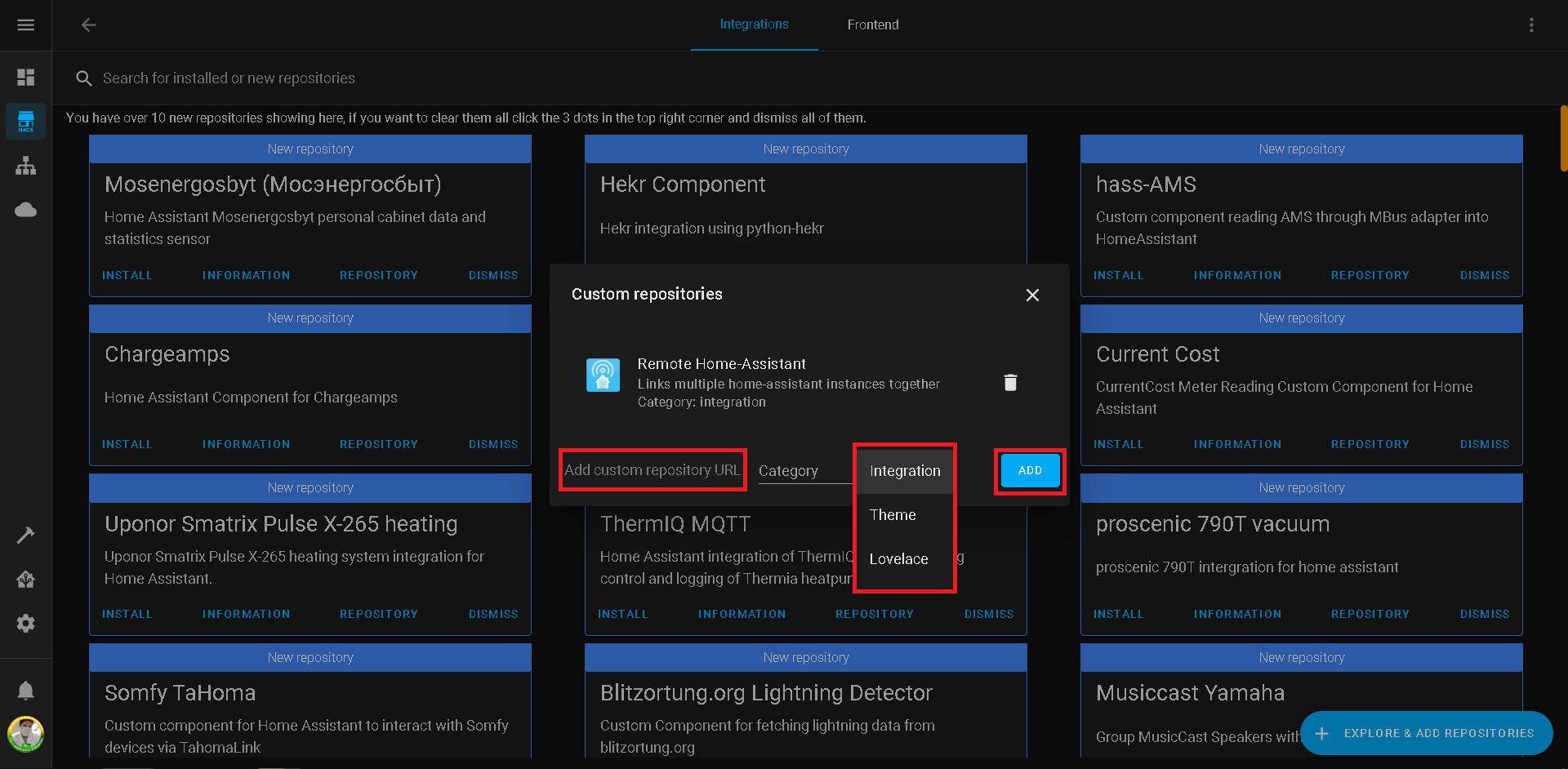
Depois vá no menu no canto direito superior e vá em Custom Repositories.

Em Add custom repository URL coloque o endereço do github do repositório:
(https://github.com/PiotrMachowski/Home-Assistant-custom-components-Xiaomi-Cloud-Map-Extractor) e selecione “integration”, clique em ADD.
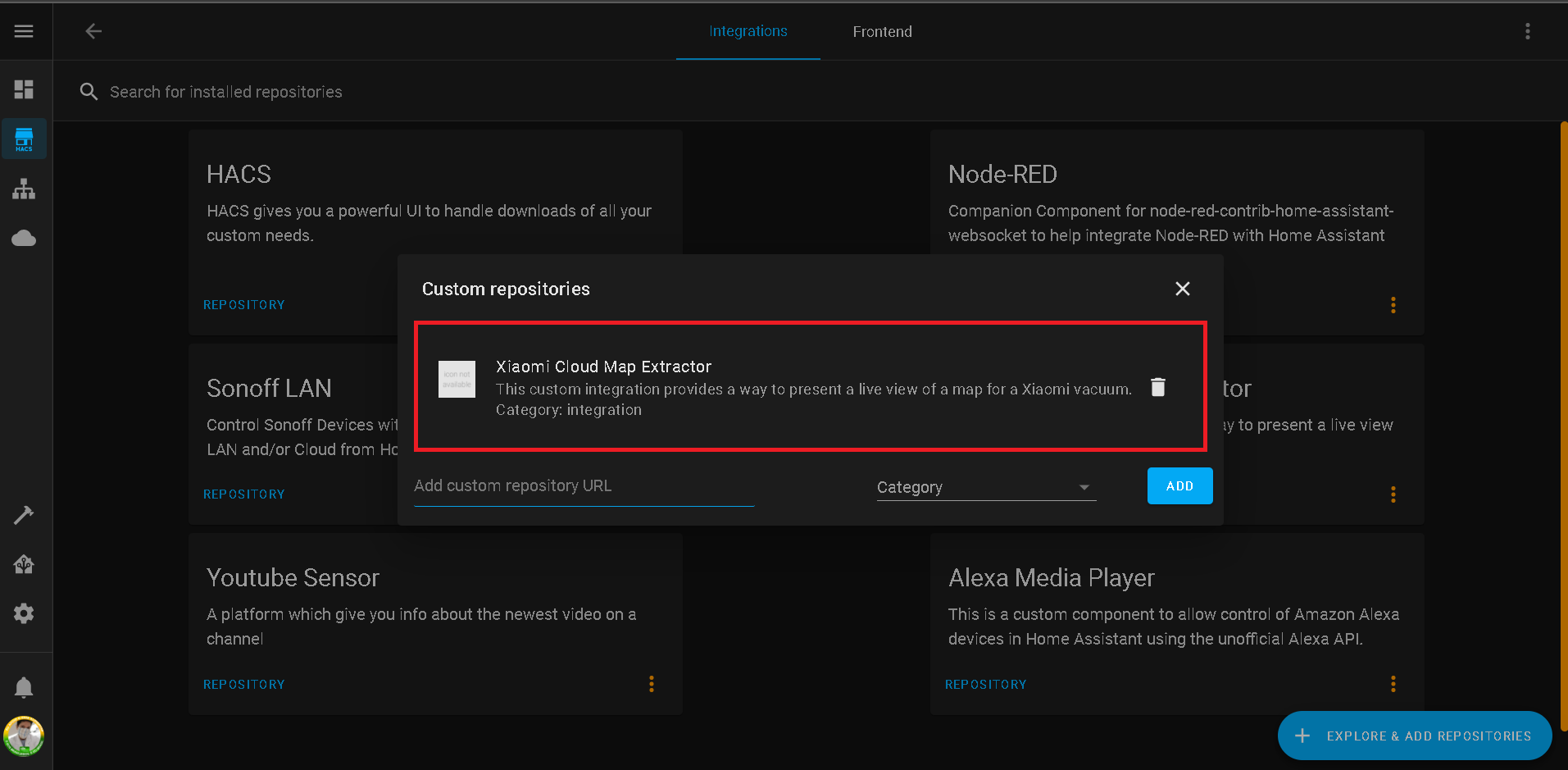
Vai ficar assim e reinicie o Home Assistant para a integração ser instalada.
Agora você precisa adicionar ao seu configuration.yaml o seguinte código para criar uma “câmera” do mapa do seu robô aspirador Roborock.
camera:
- platform: xiaomi_cloud_map_extractor
host: !secret xiaomi_vacuum_host
token: !secret xiaomi_vacuum_token
username: !secret xiaomi_cloud_username
password: !secret xiaomi_cloud_password
draw: ['all']
attributes:
- calibration_points
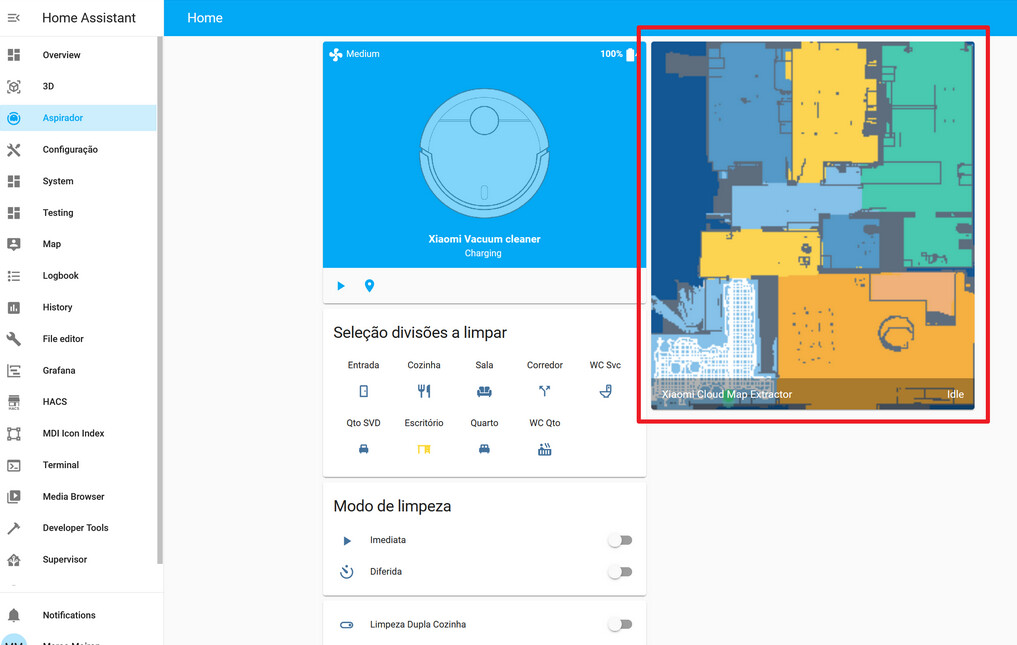
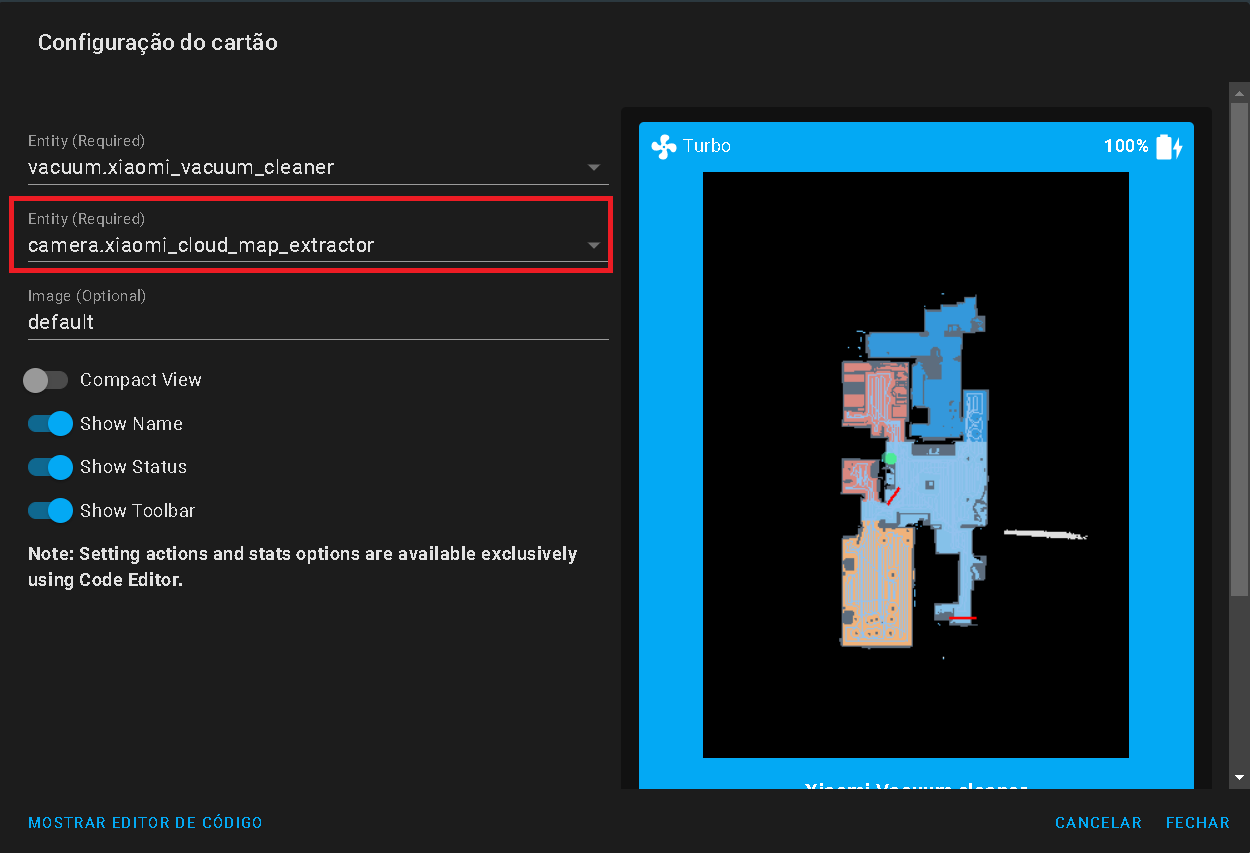
Com tudo configurado corretamente vá até o cartão do seu robô aspirador e em Entity (Required) selecione a “câmera” criada com o mapa do seu Roborock!
É isso, espero que tenham gostado!
Um abraço!
Já colocou o seu Roborock em Português do Brasil? Ainda não? Clica aqui embaixo pra colocar: