
Boas malta,
Venho partilhar a minha experiência de integração do aspirador da Xiaomi (Roborock S5) no Home Assistant.
Introdução
Esta integração tem como objetivos permitir:
- Mandar limpar uma zona a partir do HA;
- Configurar várias zonas de uma vez;
- Suportar o envio de comandos por voz através do Google Assistant em vários idiomas.
A integração com o Google Assistant é feita através do IFTTT (podem seguir este tutorial, mas em vez de canais de televisão são zonas da casa).
Neste tutorial é assumido que o aspirador já está integrado no Home Assistant (neste exemplo a entity_id: vacuum.roborock).
O método e código utilizado funcionam tanto com o firmware original como com o Valetudo e Valetudo RE.
Script Python
Para alcançar os objetivos mencionados acima cria-se um python_script:
"""
LIST OF ROOMS / LISTA DE DIVISÔES
The first position is the name of the room.
These names target voice assistant, therefore a dictionary is created
to provide more than one name to each room, and thus support
for different languages
The second position is the entity_id name and valetudo zone id
The third column is the room_id in the oficial firmware or Valetudo RE app
When using original firmware:
In order to find the room id one can use trial and error using the following command:
`miiocli vacuum --ip <IP> --token <TOKEN> segment_clean <integer number>`
and check the output in the xiaomi app
To run this command install `python-miio`
Array example:
# Room Name Room code name Room id
vaccum_room_list = [
(['sala', 'living room'], 'living_room', [18]),
(['cozinha', 'kitchen'], 'kitchen', [19]),
]
vaccum_room_list = [
(['sala', 'living room'], 'living_room' ),
(['cozinha', 'kitchen'], 'kitchen' ),
]
"""
application_name = "valetudo_re" # or "xiaomi" or "valetudo"
vaccum_room_list = [
(['sala', 'living room'], 'LivingRoom', [16]),
(['corredor', 'hallway'], 'Hallway', [17]),
(['cozinha', 'kitchen'], 'Kitchen', [18]),
(['casa de banho', 'bathroom'], 'Bathroom', [23]),
(['quarto', 'bedroom'], 'Bedroom', [21, 22]),
(['escritório', 'office'], 'Office', [20]),
(['quarto do fundo', 'guest bedroom'], 'GuestBedroom', [19])
]
# Get vacuum entity_id (if more than one)
entity_id = data.get("entity_id", 'vacuum.roborock')
# This is the room name as per 'room_alias'
room = data.get("room").lower()
# Number of runs per room
runs = int( data.get("runs", '1') )
# Start with delay
delay = int( data.get("delay", '0') )
vaccum_room_param = []
if room == "switch_based":
# Run through all room that are vacuum friendly
for r in vaccum_room_list:
entity_name = ('input_boolean.vacuum_'+r[1]).lower()
should_vaccum = ( hass.states.get( entity_name ).state == 'on' )
if should_vaccum:
if application_name == "xiaomi" or application_name == "valetudo_re":
vaccum_room_param.extend( r[2] )
elif application_name == "valetudo":
vaccum_room_param.append( r[1] )
else:
# Single room
for r in vaccum_room_list:
if room in r[0]:
if application_name == "xiaomi":
for i in range( runs ):
vaccum_room_param.extend( r[2] )
elif application_name == "valetudo_re":
vaccum_room_param.extend( r[2] )
elif application_name == "valetudo":
vaccum_room_param.append( r[1] )
if application_name == "xiaomi":
# Service call when using the original xiaomi app
service_data = { "entity_id": entity_id, "command": "app_segment_clean", "params": vaccum_room_param }
elif application_name == "valetudo_re":
# Service call when using the valetudo app
service_data = { "entity_id": entity_id, "command": "segmented_cleanup", "params": { 'segment_ids': vaccum_room_param, 'repeats': runs } }
elif application_name == "valetudo":
# Service call when using the valetudo app
service_data = { "entity_id": entity_id, "command": "zoned_cleanup", "params": { 'zone_ids': vaccum_room_param } }
hass.services.call('vacuum','send_command', service_data, False)
Neste script deve ser configurado a lista de divisões/zones/rooms da vossa casa.
vaccum_room_list = [
(['sala', 'living room'], 'LivingRoom', [18]),
(['cozinha', 'kitchen'], 'Kitchen', [19]),
]
vaccum_room_list = [
(['sala', 'living room'], 'LivingRoom' ),
(['cozinha', 'kitchen'], 'Kitchen' ),
]
- Array com o nome da divisão (letra minúscula) em vários idiomas. Util para o controlo por voz
- Nome de código da divisão/zona tudo pegado. Este é nome usado, por exemplo, no Valetudo.
- Array com o ids das divisões na app oficial da Xiaomi ou Valetudo RE (1 ou mais). Caso usem Valetudo não precisam desta coluna.
Para obter estes ids com firmware original podem usar este comando em tentativa erro com números de 1 a 32 (no Valetudo RE tá la na webapp):
miiocli vacuum --ip <IP> --token <TOKEN> segment_clean [<id>]
Devem também configurar a app que utilizam: application_name = "valetudo" # or "xiaomi"
Este python_script pode ser chamado no HA usando:
service: python_script.vacuum_room
service_data:
room: Cozinha
runs: 1
Nota: O runs aqui é para permitir aspirar várias vezes a mesma divisão (apenas testado com app da Xiaomi).
Inputs para as divisões
Após configurar estas divisões criam um input_boolean para cada uma delas:
input_boolean:
vacuum_livingroom:
name: Sala de Estar
icon: mdi:sofa
vacuum_kitchen:
name: Cozinha
icon: mdi:stove
Notem quem o nome destes input_boolean devem ser vacuum_<codename> sempre em letra minuscula.
Lovelace
Com isto já podemos criar uma view no Lovelace para colocar o nosso aspirador e os input_boolean para selecionar as zonas a aspirar.
Para isso é necessário o card custom:vacuum-card.
- type: custom:vertical-stack-in-card
cards:
- type: "custom:vacuum-card"
actions:
- icon: "mdi:sofa"
name: Aspirar Sala
service: python_script.vacuum_room
service_data:
room: Living Room
runs: 1
- icon: "mdi:stove"
name: Aspirar Cozinha
service: python_script.vacuum_room
service_data:
room: Kitchen
runs: 1
compact_view: false
entity: vacuum.roborock
show_name: true
show_toolbar: true
stats:
cleaning:
- attribute: currentCleanArea
subtitle: Área Limpa
unit: m2
- attribute: currentCleanTime
subtitle: Tempo de Limpeza
unit: minutes
default:
- attribute: filter
subtitle: Filtro
unit: hours
- attribute: sideBrush
subtitle: Escova Lateral
unit: hours
- attribute: mainBrush
subtitle: Escova Principal
unit: hours
- attribute: sensor
subtitle: Sensores
unit: hours
- type: conditional
conditions:
- entity: sensor.roborock_state
state: "error"
card:
type: markdown
title: Erro do Aspirador
content: |
{{ states.sensor.roborock_state.attributes.Error }}
- type: vertical-stack
cards:
- type: entities
entities:
- input_boolean.vacuum_livingroom
- input_boolean.vacuum_kitchen
state_color: true
title: Aspirador-Ready (5 máx.)
- type: horizontal-stack
cards:
- aspect_ratio: 12/2
entity: python_script.vacuum_room
icon: "mdi:send"
name: Aspirar Agora
layout: icon_name_state
size: 100%
tap_action:
action: call-service
service: python_script.vacuum_room
service_data:
room: switch_based
type: "custom:button-card"
Neste código devem editar as actions e o nome dos input_boolean. Deve existir uma action e um input para cada divisão. Neste exemplo é mostrado apenas duas divisões.
Terá mais ou menos este aspecto no fim (atenção que no meu caso tenho mais divisões):
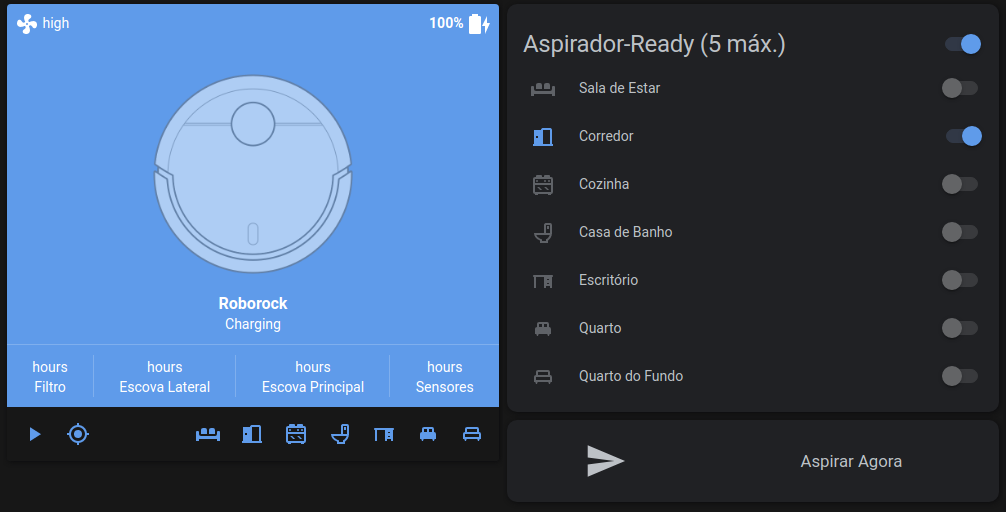
Usando este código ao clicar “Aspirar Agora” ele vai aspirar as divisões selecionadas pelos input_boolean.
O conditional card é usado para mostrar a mensagem de erro (enviada por MQTT pelo Valetudo) num sensor:
sensor:
- platform: mqtt
name: Roborock State
state_topic: "valetudo/Roborock/state"
value_template: "{{ value_json.state }}"
json_attributes_topic: "valetudo/Roborock/state"
json_attributes_template: "{{ {'Error message': value_json.error } | tojson }}"
Assim sempre que o state for error vai aparecer o texto em markdown por baixo do card do aspirador.
Google Assistant / IFTTT
Por fim falta integrar com o Google Assistant. Para tal devem criar uma routina no IFTTT (seguir este tutorial):
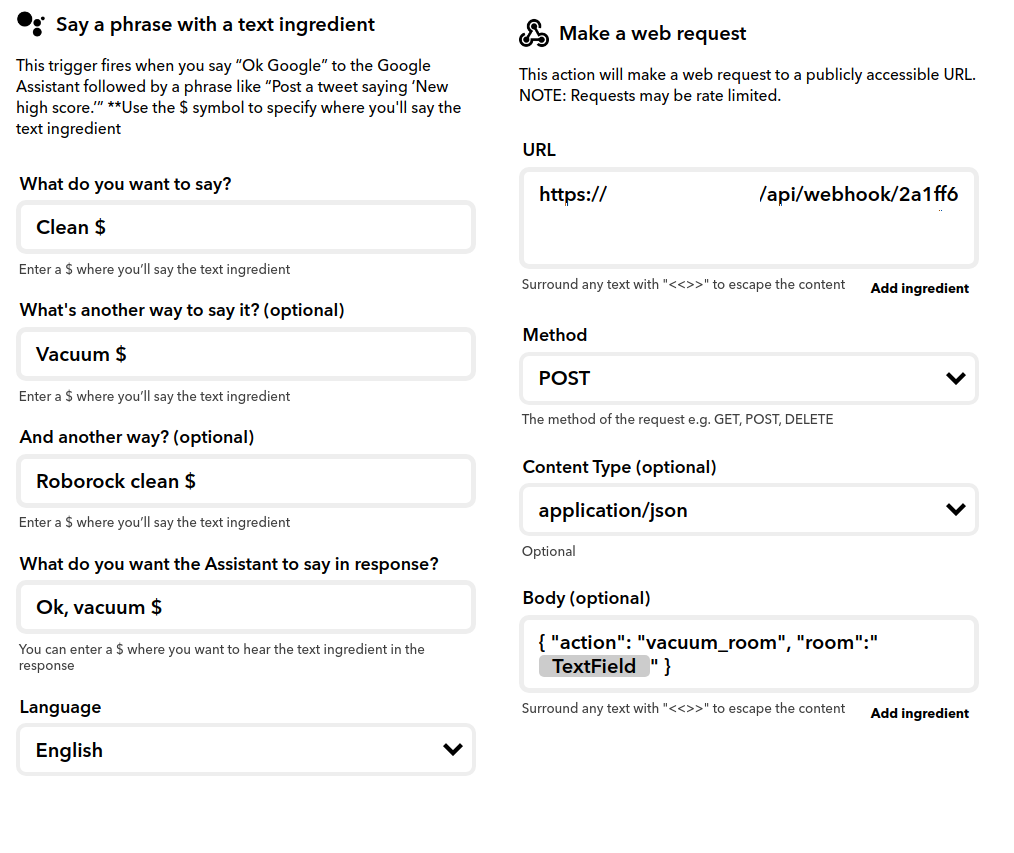
Depois disso criam uma automação para apanhar o comando do IFTTT:
automation old:
# If You say "Clean $ ", then Make a web request
# Body configured in IFTTT: { "action": "vacuum_room", "room":"{{TextField}}" }
- alias: IFTTT Vacuum Room
trigger:
- event_data:
action: vacuum_room
event_type: ifttt_webhook_received
platform: event
action:
- data_template:
room: "{{ trigger.event.data.room }}"
service: python_script.vacuum_room
Atenção ao body do comando no IFTTT:
{ "action": "vacuum_room", "room":"{{TextField}}" }
Esta automação vai chamar o python_script com o nome da divisão (no meu caso em inglês) e aspirar a divisão correspondente.
Código Fonte
Podem consultar todo o YAML que uso no meu Github:
Edit
- O cartão do Lovelace deve ser configurado para os atributos correctos, pois varia entre a integração com o miio e o Valetudo. Foi acrescentado um exemplo.
- Adicionar conditional card juntamente com um sensor para apanhar a mensagem de erro (testado com Valetudo RE).
- Melhorado o suporte para Valetudo RE e adicionei o entity_id (obrigado @codedmind)



